Экологически безопасная РЛС для охраны территориальных вод и контроля надводной обстановки
Введение
Одной из актуальных проблем в области распространения радиоволн и радиолокационной техники является создание радиотехнических средств для обнаружения надводных объектов за пределами радиогоризонта.
В настоящее время, в связи с участившимися случаями контрабандной ловли рыбы, перевозки грузов и других нарушений в территориальных водах, интерес к этой проблеме возрос. При этом необходимой задачей радиолокационной системы является не только обнаружить надводный объект, но также – определить его азимут и дальность. Кроме этого, одним из главных требований, предъявляемых к вновь разрабатываемым радиолокационным системам, является их экологическая безопасность. Например, на побережье в местах проживания населения и зон отдыха.
Как известно [1], на расстояниях, превышающих радиогоризонт, преобладающим механизмом распространения радиоволн является дифракция на искривленной морской поверхности с присущим ей большим ослаблением сигнала. По этой причине в условиях стандартной атмосферы дальность действия РЛС определяется именно дифракционным механизмом распространения радиоволн. Все нестандартные механизмы распространения, связанные с аномалиями вертикального распределения показателя преломления, хотя и имеют место во многих районах Мирового океана [2, 3], не могут обеспечить требуемую вероятность обнаружения надводных объектов за пределами радиогоризонта.
В судовой радиолокации наибольшее применение получили сантиметровые волны, которые обеспечивают высокий энергетический потенциал при сравнительно небольших габаритах антенных систем и повышенное значение эффективной площади рассеяния надводных объектов. Кроме этого, 3 см диапазон имеет в некоторых районах высокую вероятность появления волноводного распространения радиоволн за пределы радиогоризонта [4]. По этим причинам в предлагаемой радиолокационной системе применен именно этот диапазон радиоволн.
Определение необходимого энергетического потенциала
Для определения необходимого энергетического потенциала воспользуемся основным уравнением радиолокации [5]
Как следует из основного уравнения радиолокации [5], дальность действия зависит от технических характеристик РЛС или ее энергетического потенциала , эффективной площади рассеяния надводного объекта и множителя ослабления трассы распространения радиоволн.
Определим энергетический потенциал , необходимый для обнаружения малоразмерного надводного объекта с м2 (катера и т.д.) на расстоянии км, позволяющем осуществить охрану территориальных вод и превышающем радиогоризонт rпр = 20 ÷ 25 км (предполагается, что высота установки антенной системы РЛС лежит в пределах =20÷30 м).
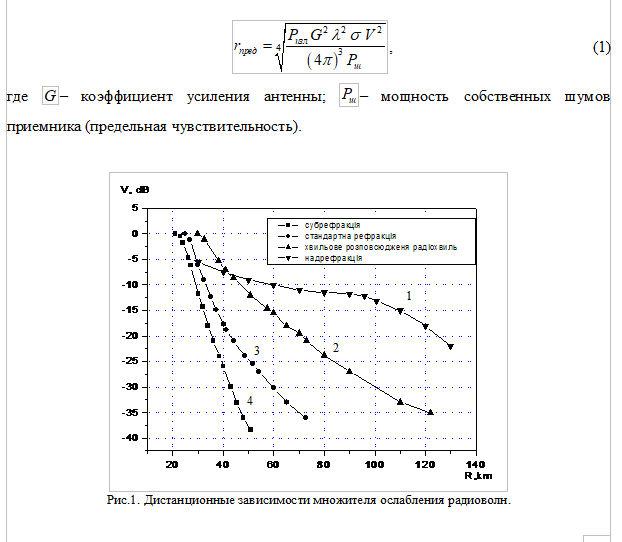
Как видно из Рис. 1 (зависимость 4), при наихудших условиях распространения радиоволн на расстояниях =50 км множитель ослабления равен –40 дБ. Энергетический потенциал С, необходимый для обнаружения надводного объекта с эффективной площадью рассеивания на расстоянии будет равен
. (2)
Подставив значения , , в выражение (2), получим необходимое значение энергопотенциала С250 дБ. Создание РЛС с таким энергетическим потенциалом представляет собой достаточно сложную техническую задачу.
Например, один из лучших метеорологических локаторов МРЛ-5 обладает в этом диапазоне энергетическим потенциалом С=216 дБ при излучаемой мощности в 200 кВт и большими размерами антенной системы. Большая излучаемая мощность нарушает экологию окружающей среды в месте установки РЛС.
По этим причинам применение мощной импульсной РЛС для загоризонтного обнаружения надводных объектов весьма проблематично в местах проживания населения, расположения туристических гостиниц и т.д.
Применение РЛС с непрерывным излучением высокостабильного сигнала и приемом его приемником с узкой полосой пропускания позволяет получить столь высокий энергетический потенциал, однако, требует наличия двух разнесенных в пространстве высокопотенциальных антенн для излучения и приема и необходимость высокого уровня развязки (70÷90 дБ) между ними [6].
Применение бистатической РЛС с использованием плавучего активного радиобуя, установленного за пределами радиогоризонта
Как видно из выражения (1) (2), большое влияние на дальность действия РЛС и необходимый энергетический потенциал С имеет величина множителя ослабления V, которую необходимо учитывать дважды при прохождении прямого и отраженного сигналов. В рассматриваемом примере дБ.
Поэтому для уменьшения влияния ослабления радиоволн на дальность действия РЛС предлагается применение бистатической РЛС с использованием плавучего активного радиомаяка, установленного на якоре за пределами радиогоризонта. В настоящее время описано множество вариантов использования плавучих радиомаяков в целях радионавигации, радиосвязи, радиолокации и т.д. [1].
На Рис.8.2 схематично показана предлагаемая радиолокационная система. Приемный центр А установлен на берегу и состоит из вращающейся высокопотенциальной антенной системы 1, приемника отраженного сигнала 2, блока обработки сигналов 3, дополнительной малопотенциальной антенны 4 и приемника прямого сигнала 5. На мачте буя B установлена ненаправленная в горизонтальной плоскости антенна 7 (диаграмма направленности передающей антенны сужена в вертикальной плоскости), а на самом буе передающее устройство 8, излучающее высокостабильный непрерывный сигнал.
Продолжение смотрите в Приложении.